От 6 лопастей отказался или нет?
Картинки кидай, посмотрим 
Как можно отказаться от шести лопастей? Ради этого все и затевалось

Шучу, конечно. 3 лопасти на ротор - это конечно малость меньший кпд, чем у 2-х лопастей. Но большая тяга и самое главное - способность реализовать большую мощь от мотора. Эффективнее передать безумную энергию современных моторов воздуху.
К тому же, сам по себе соосный ротор имеет больший кпд, аналогичного классического.
Картинки
Оставлю здесь для истории, вдруг кому интересно в каком направлении мысль двигалась.
Сначала я думал расположить сервы как у гоблина, мне нравилась эта идея.

Потом сделал аналогично, но симметрично.
В итоге это решение оказалось слишком широким, переделал на вертикально расположенные сервы

В начале хотел использовать какую-нибудь штатную систему фбл. Но это не позволяет реализовать привычное управление в инверте без ухищрений. Пришлось сделать механические микшеры дифференциального шага. И плюс отдельную гиру, которая меняла бы направление работы при переходе через нулевой шаг.
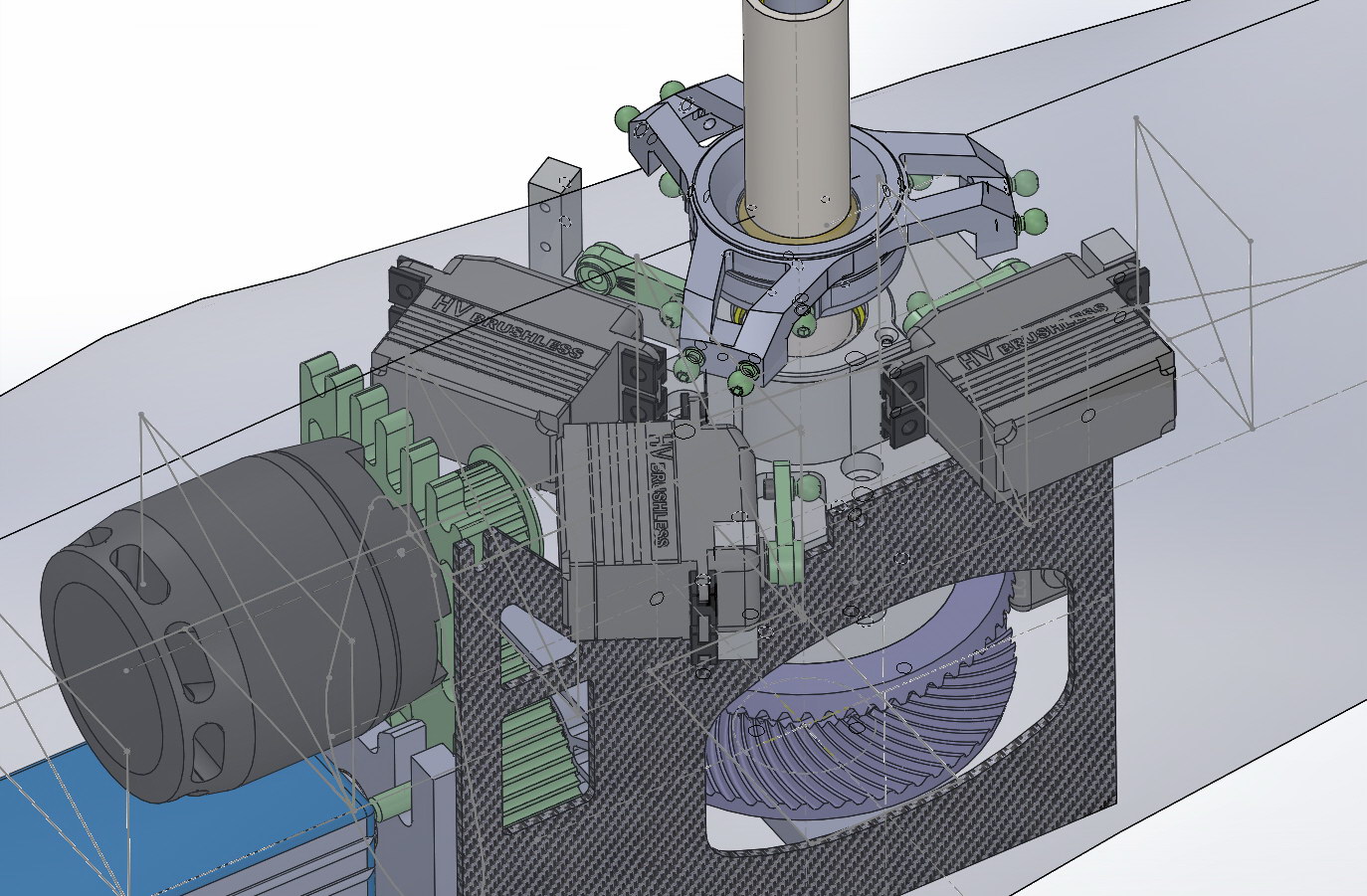
Вот что вышло, это колонка роторов
Четвертая серва, которая управляет дифференциальным шагом не показана, она снизу.
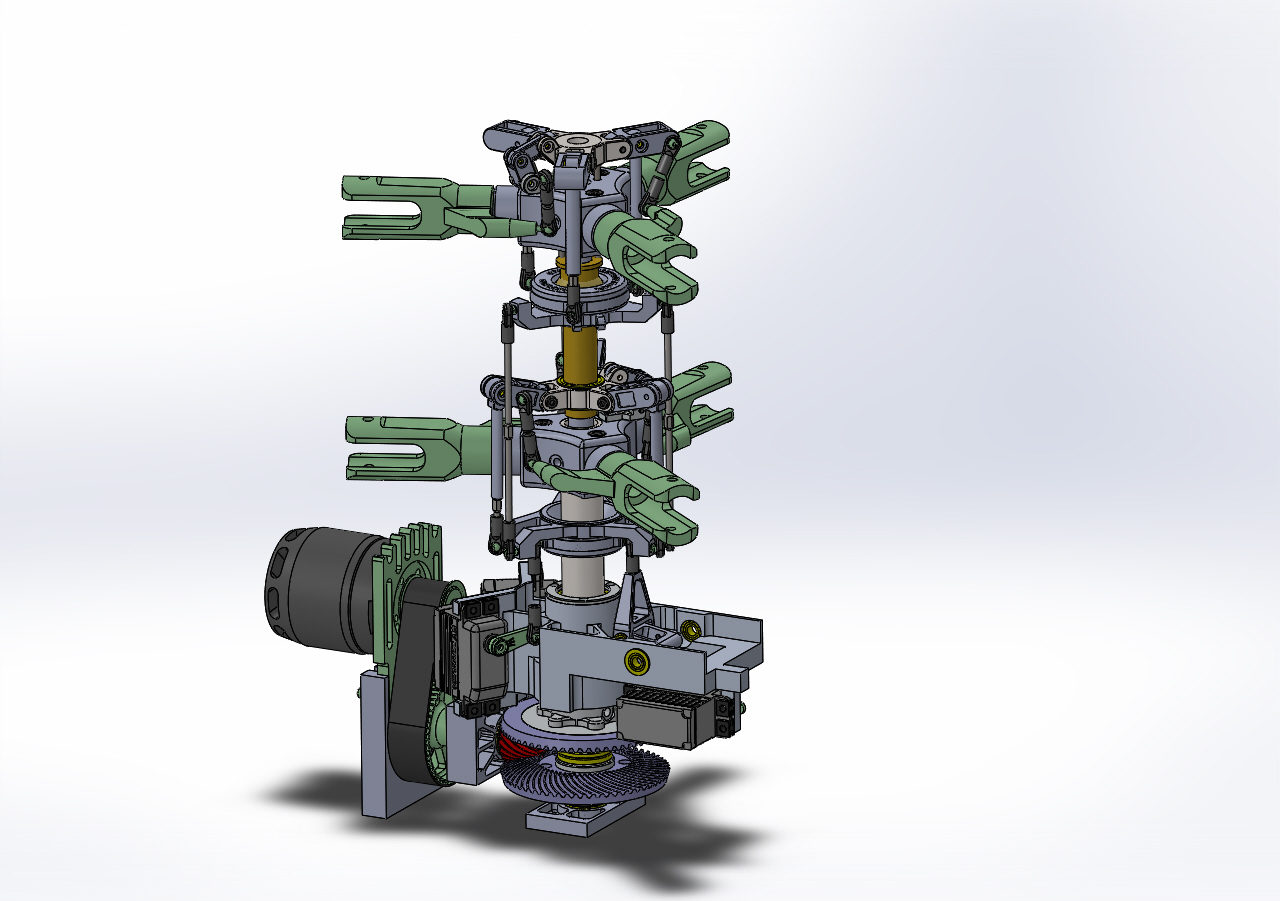
Компоновка с одним движком

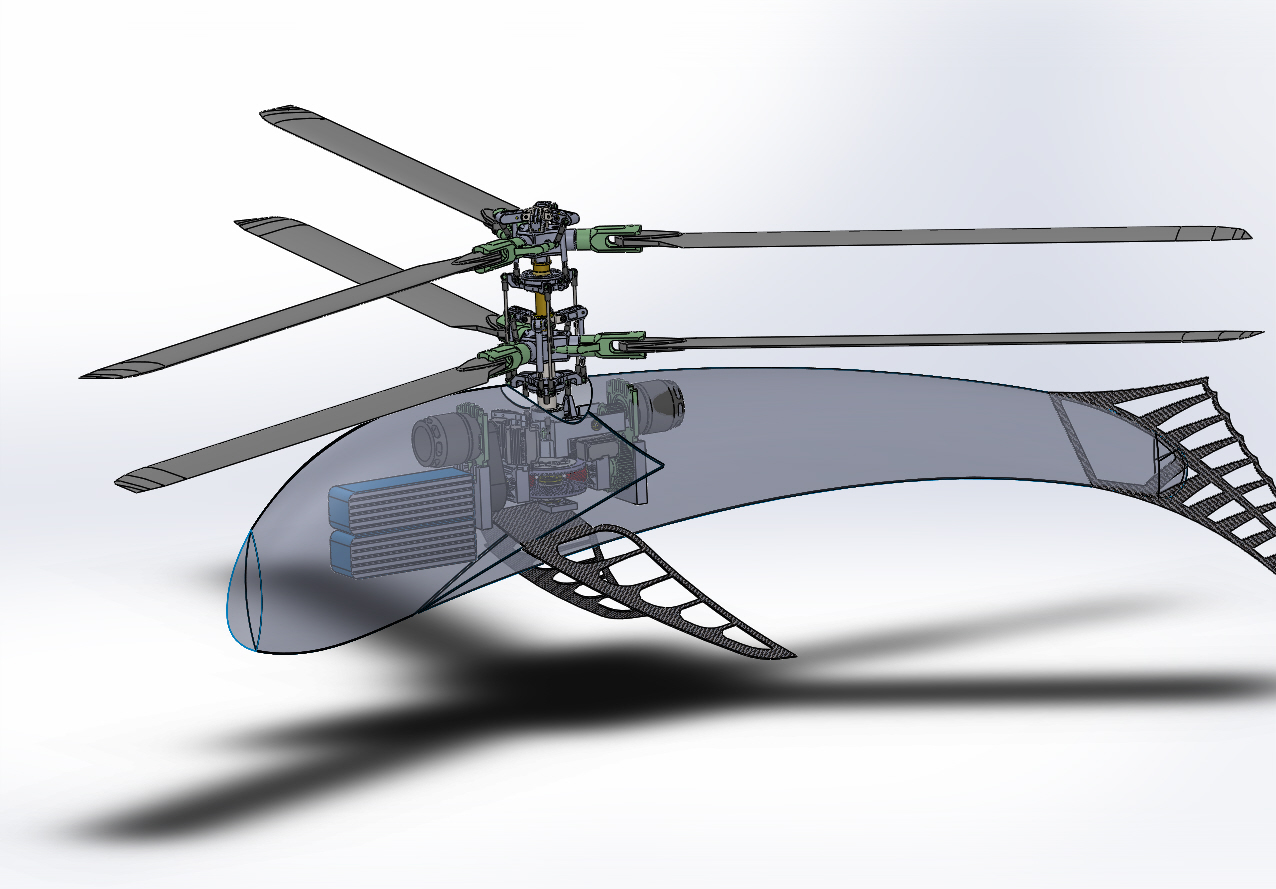
Компоновка с двумя. Очень легко компонуется двумя движками, что может дать очень хорошую тягу на скоростных полетах.
Это решение имеет очевидные минусы в виде сложности конструкции, кучи люфтов в безумном количестве тяг, которые будут суммироваться при износе, требовательность к точной настройке нуля. Да и в целом, конструкция обладает слишком большим количеством элементов на мой взгляд, что уменьшает ее надежность. Плюс вся эта вращающаяся хрень создает нехилое сопротивление воздуху.
Поэтому назрела следующая концепция. Взять решение попроще, только с верхним диф.микшером, а общий шаг микшировать с диф. в аппе. Впрочем последнее делать не обязательно, можно просадки по высоте подправлять ручками. Так делают на копиях. Летает это решение хорошо и надежно. Но инверт ему с обычными фбл не светит.
Для инверта при такой схеме нужна своя фбл. Которая будет все миксы внутри себя просчитывать. Этим я и занимался последнее время.
Лишившаяся большей части тяг конструкция станет надежнее и проще в настройке.
Но сейчас меня гложет мысль, что все это полумеры. Тем более, что несмотря на выкидывание части тяг, в конструкции остается множество мелких деталей.
Хорошая система должна быть симметричной.
Прорабатываю вариант отказа от тарелок перекоса и всех этих тяг.
Есть еще вариант с одним по сути приводным валом, он с одной стороны лучше, а с другой - не стоит переусложнять конструкцию без веских причин.
А насчет когда полетит - тут хз. Последние пару лет жесткая задница с деньгами. Были бы деньги я бы давно уже сделал сложный вариант (как на картинках).
Но можно извлечь из ситуации хорошее
Нет денег на постройку - думаю дальше об улучшении конструкции
 RCHeliClub.ru -->
RCHeliClub.ru -->
 Manifesto - соосный проект
Manifesto - соосный проект
 Тема: Manifesto - соосный проект (Прочитано 39447 раз)
Тема: Manifesto - соосный проект (Прочитано 39447 раз)