Итак, дорогие друзья, у меня есть , что сказать за этот регуль.
За прошедшие дни HW 160 был установлен, настроен и вчера-сегодня
основательно облётан на поляне в Сетуни.
Рассказываю по порядку.
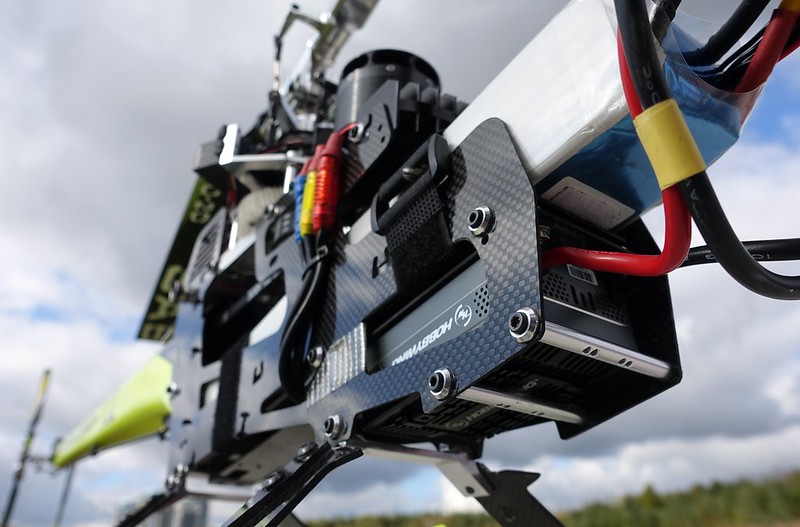
1. Монтаж и установка: сложностей никаких, крепёжные лапки почти как у Космика
(чуть-чуть уже), поэтому встал на штатное место отлично. Провода выходят из
корпуса без разъёмов, длинна как специально подобрана, всё удобно и просто.
 DSC00893
DSC00893 by
Igor Kulichik, on Flickr
2. Настройка: по логике и алгоритму всё очень похоже на тот же Космик. При включении задаются
крайние точки газа, затем с помощью Program Box делаются все настройки.
Первое включение после настройки , так же как и у Контрона - это женитьба мотора и регуля
(на 0 градусов лопастей надо дать регулю выйти на плановые обороты и "запомнить" их).
Отдельно скажу про Program Box - после ебливприсядку с про-диском здесь всё супер
удобно и просто: подключил, нажал и листаешь параметры, меняя их туда-сюда, очень юзер-френдли.
Про сами настройки: HW указывает, что рабочий диапазон работы гувера от 40% до 90%
Ниже 40 - зона работы бэйл-аут , выше 90 - не рекомендуется.
В итоге, полки по сравнению с Космиком поднялись на 10% и рабочие обороты получились на 80-85%.
3. Облёт и полёт: первое впечатление - как будто взлетел на Космике (вот не отличил бы с первого раза,
если бы в слепую дали сравнить). Гувер работает чётко и более жёстко, чем Космик с базовыми настройками.
P-gain и I-gain крутил туда и сюда, оптимум оказался близко к базовым настройкам.
За два дня сделал 10 полётов, аккуратно покрутил разные параметры, в итоге выбрал более менее
оптимальные (которые почти близки к дефолтным).
Про сильно обсуждаемый ШИМ: очень соответствует тому, что писал Сергей выше - изменение от 15 до 30 kHz
регулю пофигу. При значении 8 как-то не очень (но может это чисто субъективно), поэтому поставил максимальные 30 kHz.
Тайминг пробовал тоже крутить, сказывается на реакции мотора при попытке навалить ему,
больше всего понравилось при 18 (ниже как-то более плавно, а выше - уже нет эффекта).
Бэйл-аут работает отлично, причём можно настраивать и время ожидания (чего нет у Космика) и
время запуска после авторотации.
После полёта "на все деньги" (круги и петли на полных шагах, тик-таки во все стороны, отторомозки апстену)
мотор горячий как обычно, а регуль - еле тёплый (вентиляция с дырочками в корпусе явно хорошо работает).
Итоговые настройки :
1. Flight Mode - Heli (Store Governor)
2. LiPo Cells - auto
3. Voltage Cutoff Mode - soft
4. Cutoff Voltage - 3.0
5. BEC Voltage - 8.0
6. Start-up Time - 10 s
7. Governor Parameter P - 3
8. Governor Parameter I - 5
9. Auto Restart Time - 25 s
10. Timing - 18
11. PWM Frequency - 30
12. Brake Force/Amount - 0
13. Motor Rotation - norm
14. Restart Acceleration Time - 3 s
15. Con.Freewheel - activate
Выводы:
- первое впечатление - регуль работает великолепно,
- гувер очень хороший, сложно предъявить претензии,
- не известно, как будет длительная эксплуатация (будет ли гореть?
будет ли глючить? как часто будут поломки?) , но первое впечатление -

снимать с Гоблина я его не буду , пусть стоит там и работает.
 DSC00899
DSC00899 by
Igor Kulichik, on Flickr
 .
. by
Igor Kulichik, on Flickr
P/S
Очень хочется добавить рекламный слоган "Если нет разницы, зачем платить больше?" ,
но опасаюсь, что Коля Nik Nik при упоминании Доси опять очень расстроится и начнёт
предостерегать от использования "дешевых" брендов



 RCHeliClub.ru -->
RCHeliClub.ru -->
 Hobbywing Platinum160 HV
Hobbywing Platinum160 HV
 Тема: Hobbywing Platinum160 HV (Прочитано 85996 раз)
Тема: Hobbywing Platinum160 HV (Прочитано 85996 раз)